Tiny Tim
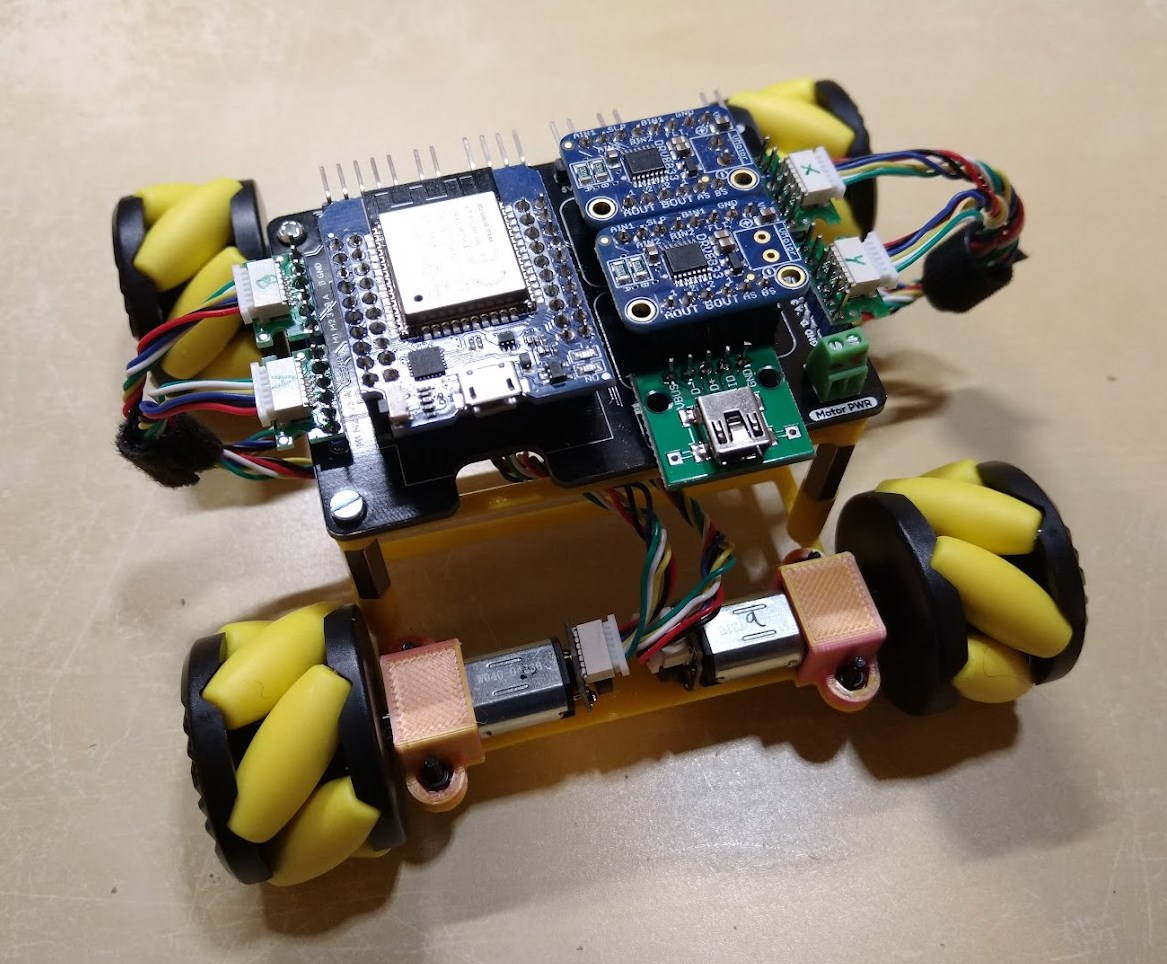
This is a small 4-wheel drive robot with Mecanum wheels.
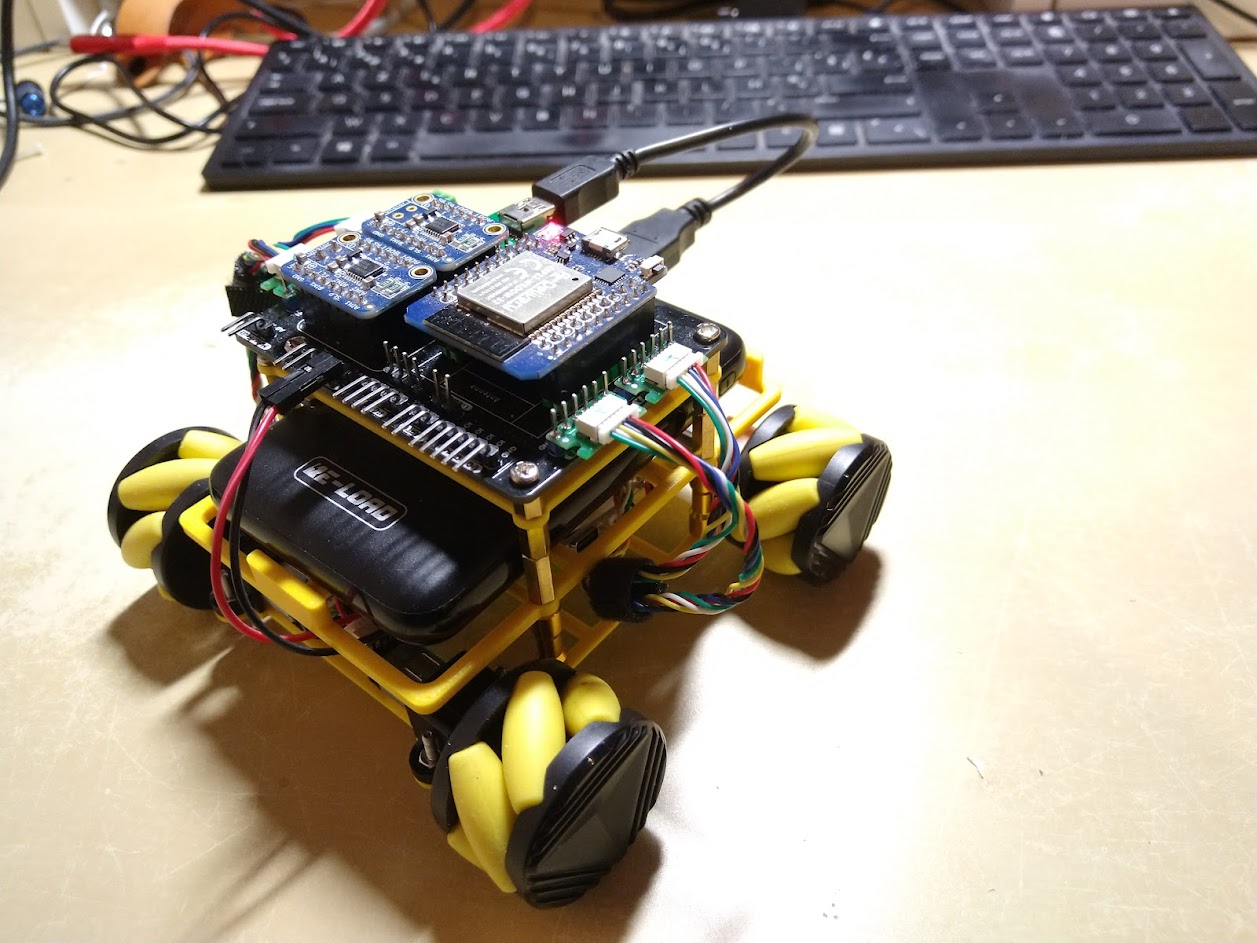
The robot uses my Motor Board v2 - ESP32 Motor Board as the brains.
Components
-
1x ESP32 D1 Mini Nodemcu microcontroller
-
2x Adafruit DRV8833 motor drivers
-
some male / female socket headers
-
2.54mm 2-pin screw terminal
-
some 3M spacers and screws
Construction
Cad files for the 3D printed parts are available here. It was made in Fusion 360 and consists of three parts:
-
a motor plate where the motors are screwed on
-
a battery holder plate which gives some support to the battery pack
-
an adaptor to screw on the PCB
Between the parts, spacers are used.
notes
-
GPIO0 for X motor does not work when powered over USB (unless serial connection is made over it), due to wiring of CTS, DRT stuff. Powering over 5V pin works fine.
-
combination of PS3 Controller and Wifi libraries resulted in too much Flash memory being used for default partitioning. Using huge_app.csv partition table in platformio file solved this.
-
goes too slow now in translation mode
-
whines when stationary, better stop the motors when detected that they are going too slow